在 GitHub 上找到一本解读 Go 实现细节的好书,名叫《深入解析 Go》。
大致看了一遍,简单做了些笔记。
这本书的代码来自 Go 1.3,所以还有一部分由 C 语言写成。
这份笔记里的代码来自 Go 1.12.5,数据结构全部由 Go 语言实现。
数据结构
string 和 slice 都是引用类型,可能开在栈上,也可能开在堆上;
channel 和 map 是引用类型,但一定开在堆上,栈中只有指针。
string 底层结构
src/reflect/value.go
1 | type StringHeader struct { |
string 是不可变数据结构,任何对 string 的操作都会产生一个新的 string. 因此,需要拼接的时候尽量使用 bytes.Buffer,或 strings.Join 这种用了 Buffer 的函数。
slice 底层结构
src/reflect/value.go
1 | type SliceHeader struct { |
注意,两个数据结构的底层数据全部共享。
关于 slice 的扩容,可以参见《深入解析 Go 中 Slice 底层实现》。
有一个小用法:对切片做 slice 操作时,末位的下标可以超过原 slice 的 len,但不能超过 cap.
1 | a := make([]int, 2, 10) |
map 底层结构
src/runtime/map.go
1 | type hmap struct { |
注意看上面的 NOTE 里的 KV 排列结构,这样做有利于内存对齐。
bmap 后面的内存分配未在结构体中定义,需要拿 KV 的时候要通过 unsafe.Pointer 根据 offset 去拿。
见 mapaccess1 或 mapaccess2.
哈希表在每次扩容时,容量会增大到原来的两倍,也就是从 2^B 到 2^(B+1)。为了保证运行效率,会将 key 的搬迁操作平摊到每一次写操作(insert & remove)上,每次操作时迁移 1-2 个键值对。查找时会先在 old—buckets 中找,找不到再去新的 buckets 中找。
map 使用快速的 murmurhash 作为哈希算法。
map 解决冲突的方法是链地址法的改进形式。
在创建 bmap 时,会分配一个数组,都可以容纳 8 个键值对。发生哈希冲突时,都会将新的键值对放入添加到数组里。如果数组放满了,则会新建一个 bmap,通过 overflow 指针来链接到当前 bucket 节点后面。
关于查找、插入和删除的细节,请见该书相关章节。
一个需要注意的点:在 bmap 链中,相同的 Key 可能会存在于两个 bucket 里,而前面 bucket 的值会直接覆盖后面 bucket 的值。在进行更新操作时,如果前面 bucket 不存在该键,但是数组包含空位,则直接在该 bucket 中插入,而不会再去链表后面的 bucket 中查找并更新。查找操作亦然。怎么说,这个机制有点像 docker 镜像中的不同层的文件覆盖机制。
channel
src/runtime/chan.go
1 | type hchan struct { |
以前 channel 的缓冲区会在 hchan 之后的内存中创建,现在将它们分开了。
对 channel 进行读写操作的时候,会根据缓冲区的状态、以及读 / 写链表来决定是否要阻塞当前 goroutine,阻塞的话会将当前的 G 挂载链表中。
interface
1 | // 带方法的接口 |
Type 的 UncommonType 会记录某个具体类型实现的方法;
interface 的 Itab 的 InterfaceType 中的方法表,记录了接口所声明的方法;
itab 的 fun 数组,记录了具体的函数指针,用作接口值的方法缓存。
在接口值赋值时,会将 UncommonType 和 InterfaceType 中的方法表进行比对;如果比对成功的话,会将 UncommonType 中的方法指针拷贝到 itab 的 fun 中,方便方法调用时对方法进行查找。
方法调用
a.F(b) 会在编译时直接转换为 A.F(a, b);
当一个类型被匿名嵌入结构体时,它的方法会被拷贝到嵌入结构体的 Type 的方法表中。这个过程在编译时就可以完成。
接口的方法调用要通过 itab.fun 中的函数指针来确定具体调用的方法。方法拷贝的过程是在运行时完成的,所以接口的方法调用的成本要略高于一般方法调用。
函数调用协议
Go 把返回值放在上一个栈帧最后的内存中,这样调用链前后的两个函数都可以触及到这段内存,以此来实现多值返回。
1 | 返回值2 |
go 关键字是个语法糖,go f(args) 可以看做 runtine.newproc(size, f, args);
同样 defer 也是语法糖,通过 runtine.deferproc 和 runtine.deferreturn 来实现。
连续栈
一个程序中可能会有非常多的 goroutine,为了节省内存,每个 goroutine 一开始只会得到非常小的一块栈。
使用可变栈时,每次函数调用时,都会通过 SP 和 stackguard 检查栈的使用情况。
当栈不够大时,会进行栈扩张,开一块新栈,并把旧栈的内容复制过去。如果栈里有指针,而指针指向的是栈中的变量,那么在复制时会对指针的值加一个偏移,来保证指针指向的对象是被迁移过后的对象。
gc 时,如果检测到栈只用了不到 1/4 时,会将栈缩小为原来的 1/2.
闭包
Go 通过 escape analyze 来检查逃逸的值,从而确定该值是否应该在堆上创建,而不是在栈中。
1 | func New() *T { |
返回闭包时并不是单纯返回一个函数,而是返回了一个结构体,记录下函数返回地址和引用的环境中的变量地址。书中是有这样一个结构体的,但在我的源码里,这个数据结构应该是用汇编实现了。
Go 程序初始化
- 系统初始化:初始化栈、设置本地线程存储(g)
- 调度器初始化:
runtime.schedinit
根据GOMAXPROCS决定可用线程数;把runtime.main放入就绪线程队列;
调用runtime.mstart,mstart调用schedule,也就是一直运行的调度器。 schedule选中runtime.main- 通过
newm(sysmon, nil)启动一个线程运行sysmon,用于处理网络 epoll - 通过
runtime.newproc启动一个 G 执行 scavenger,用于垃圾回收 - 调用
main.main进入用户代码。
- 通过
会单独启动一个线程(M)用于 poll()。GC 都是 goroutine,这个任务的地位是高于 GC 的。
调度模型
Go 如何实现并发?
Go 通过 goroutine 和 channel 来实现 CSP 并发模型,从而实现并发。
- goroutine 是 Go 语言中并发的执行单位。可以理解为轻量级的“线程”。
- channel 是 Go 语言中各个并发结构体 (goroutine) 之前的通信机制。 通俗的讲,就是各个 goroutine 之间通信的“管道”,有点类似于 Linux 中的管道。
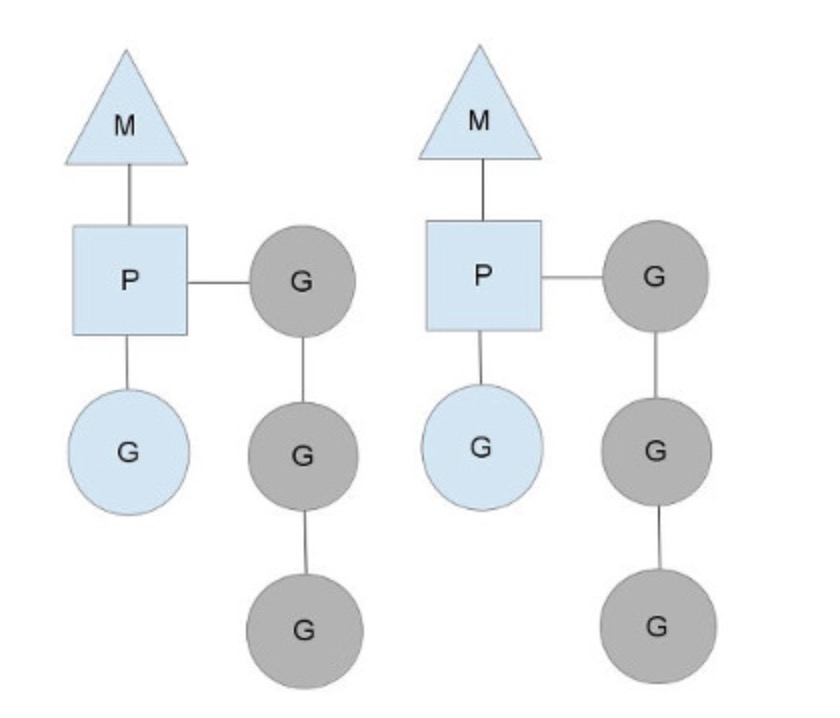
再深入一点,Go 线程模型的实现依靠 MPG 以及 Sched 结构体。
M 是 Machine,是对机器的抽象,一个 M 会关联一个物理线程;
P 是 Processor,代表 Go 代码执行是所需要的资源;
G 是 Goroutine,代表 Goroutine 的控制结构;
Sched 是调度实现中使用的数据结构。
多个 G 会以队列的形式挂靠在 P 上;当 G 与 M 绑定时,才能够执行 Go 代码。
调度时会采用抢占式调度模型以避免一个 goroutine 运行太长时间;某个 P 的队列变空时会从其它的 P 队列上偷 G,然后继续运行。
http://morsmachine.dk/go-scheduler
系统调用细节
当某个 goroutine 发起一次系统调用时,会调用 runtime.entersyscall。
调度器会将 G 的状态设置为 Gsyscall 后放入就绪队列;
此时,p 会和 m 进行剥离,p 的状态被设为 Psyscall,而 m 会去执行系统调用。
如果系统调用时非阻塞的,那么 m 会很快返回。返回时会调用 runtime.exitsyscall,这个时候会去检查当前 m 的 P,如果 P 处于 Psyscall 且队列非空,则重新将 p 和 m 绑定,恢复 g 的状态为 Grunning,继续运行。
如果 goroutine 发起的是阻塞的系统调用,则会调用 runtime.entersyscallblock。
与 entersyscall 不同的是,entersyscallblock 会调用 releasep 和 handoffp。
releasep 将当前的 M 与 M 关联的 P 剥离,M 会负责去执行系统调用;
执行 handoffp 会让 P 尝试挂靠到其它空闲的 M 上继续执行。
如果 P 上没有 G 了,P 会被设置为 Pidle;如果没有空闲的 M 了,则会调用 startm 来让 P 与新的 M 绑定后继续执行。
当系统调用完成时,要让发起调用的 G 来继续执行。这时 G 会去找可用的 P。如果当前不存在 Pidle 的 P,调度器将会把 G 变成 Grunnable,将它挂到全局的就绪 G 队列中,然后停止当前 m 并调用 schedule 函数。
换句话说,block 的时候,可能 m 上的 P 会空闲,等 m 返回后还可以继续挂载执行,此时 M-P-G 的绑定原样恢复。整个逻辑就有点像非阻塞调用。如果 m 上的 P 去干别的了(比如又找了个新的 M 继续执行),那么当前 m 会将信息传递给 G,改变 G 的状态,然后 m 自己退出(因为所有的 P 都有 M 了)
内存管理
内存池
每个线程都会有自己的本地内存,当线程内存不够时会向全局分配链中申请内存。
Go 会为每个 M 在 MCache 中存储一些空闲的小内存块;作为备用分配存储。当 MCache 用完后,会从 MCentral 自由链拿一些对象进行补充;MCentral 为空时,又会从 Mheap 中拿一些对象进行补充。这样的多级批量补充机制减小了全局内存加锁的开销。
- 当程序需要小对象(小于 32K)时,会直接从
MCache中分配,对象被回收后控制内存返回给全局控制堆(MHeap);
从MCache中分配避免了在全局控制堆上频繁加锁。 - 当需要大对象时,会直接从全局控制堆上以页(4KB)为单位进行分配。因此大对象总是页对齐的。
垃圾回收
Go 语言使用标记清除算法来完成垃圾回收,整个回收过程会 stop the world.
标记阶段从 root 区域出发,扫描所有直接或间接引用的对象;清除阶段直接扫描堆区,对未被标记的对象进行回收。
由于标记过程是一个树形的操作,所以这个过程被并行化,以提升速度。
网络
Go 通过运行时层面对 epoll/kqueue 的封装来实现非阻塞 io.
封装层次:
- 平台相关的 API 封装
- 平台独立的 runtime 封装
- 用户级别的库封装(如
net)
在 runtime.main 启动时,会运行 newm(sysmon, nil),而 sysmon 就会每隔一段时间执行 runtime.epoll。sysmon 的地位要比 gc 重要的多,而且会频繁执行,所以会单独为它分配一个系统线程(m)来运行。